

Robot Cilindrico
El robot cilíndrico tiene una articulación giratoria para la rotación y una articulación prismática para el movimiento angular alrededor del eje de la articulación. La articulación giratoria se mueve en un movimiento de rotación alrededor del eje común. Por el contrario, la articulación prismática se moverá en un movimiento lineal.
El brazo principal de los robots cilíndricos sube y baja. Un cilindro integrado en el brazo robótico produce este movimiento al estirarse y retraerse. Los engranajes y un motor impulsan el movimiento de muchas de estas versiones robóticas cilíndricas, mientras que un cilindro neumático impulsa el movimiento vertical. Los procesos de montaje, la gestión de máquinas herramienta y equipos de fundición a presión y la soldadura por puntos se realizan con robots cilíndricos.
El movimiento de este robot es fundamentalmente hacia arriba y hacia abajo en la parte principal del cuerpo y circular en la base, y el nombre 'robot cilíndrico' se origina en la forma física del sobre de trabajo cilíndrico. En este movimiento hacia arriba y hacia abajo es generado por un cilindro neumático, y la rotación es generada normalmente por un motor y un conjunto de engranajes. El brazo robótico subirá y bajará sobre un miembro vertical, gracias al diseño de este tipo de cuerpo. El brazo se estirará y contraerá, así como rotará a lo largo del eje vertical. El manipulador ahora funcionará en un espacio cilíndrico gracias a este diseño.

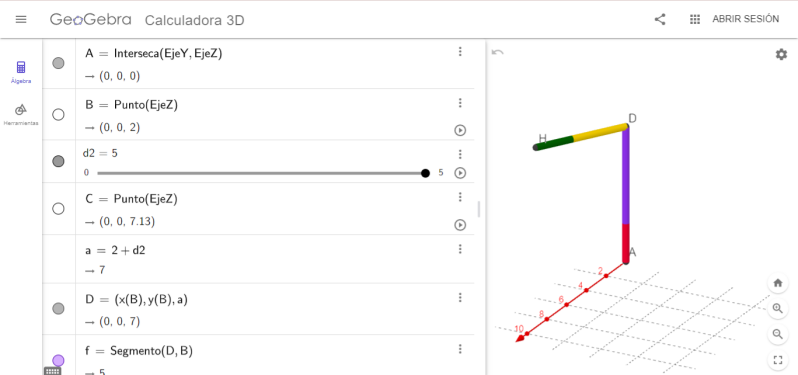
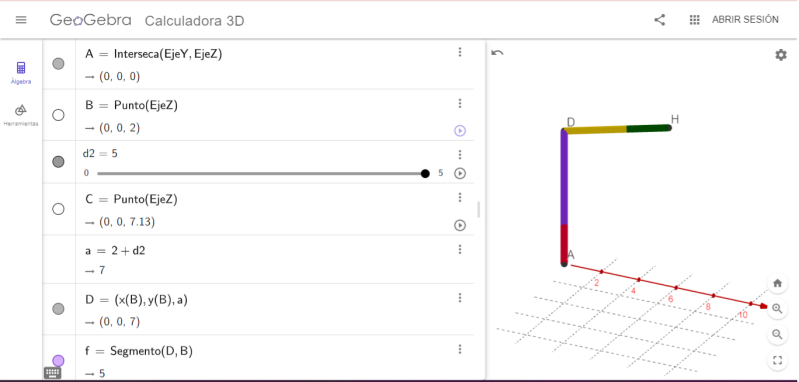
A continuacion te dejamos un enlace para que puedas manipular un Robot Scara y puedas entender mejor su funcionamiento, al igual que un archivo para poder descargarlo.
Añadir comentario
Comentarios