

1.3 Red Asibus
OBJETIVO DEL PROYECTO
Implementar y establecer las direcciones de las variables de comunicación en una AS-I para el control del llenado de 5 tanques de agua bajo la norma ISA.
En la figura 1 comenzamos trabajando con el PLC 313C-2 DP, al cual le añadimos el módulo de comunicación AS-Interface (Maestro de la red ASI) para conocer las direcciones de comunicación que dará la red.
Figura 1. Uso del módulo de comunicación AS-Interface.

Despues en la figura 2 redireccionamos el rango de los bytes de 256-271 a 0-15. Recordando que, en el primer byte, los últimos 4 bits (0.4, 0.5, 0.6, 0.7) corresponden al maestro tanto para entradas como en salidas y los bits menos significativos del primer byte corresponden al primer esclavo (0.0, 0.1, 0.2, 0.3).

Considerando lo antes mencionado, como se muestra en la siguiente tabla 1, establecemos las direcciones que adoptaría cada esclavo de la red, esto para que al momento de establecer las direcciones de cada sensor/actuador sea más fácil de identificar que bit con dirección de esclavo le corresponde.

Teniendo las direcciones de esclavos en la tabla 1, entonces procedemos a llenar los esclavos con direcciones de entradas y salidas, de acuerdo a los sensores/actuadores que hay en cada lazo de control.
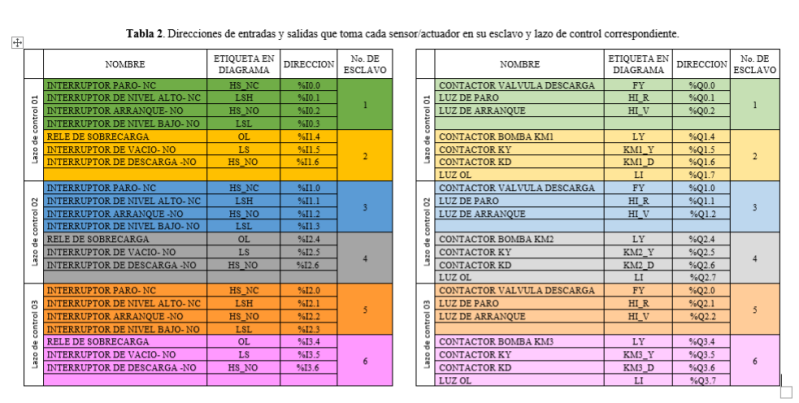
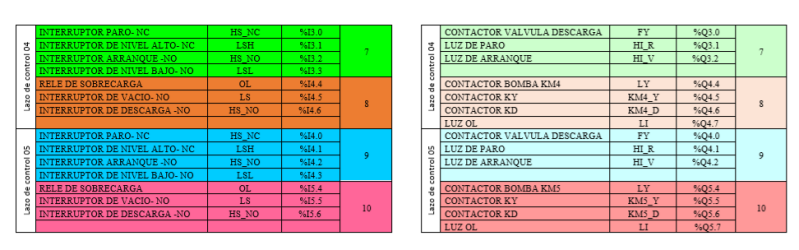
Como se observa en la tabla 2, para el llenado de cada tanque en su respectivo lazo de control, se requieren 2 esclavos, ya que el número de entradas y salidas son 7 respectivamente, para el proceso, y como sabemos cada esclavo tiene como máximo 4 bits de entrada y 4 bits de salida.
Entonces quedaría que, el primer esclavo de cada lazo de control estaría lleno en sus entradas y en sus salidas solo ocuparía 3 bits, quedando libre 1 bit de salida para cada primer esclavo (esclavo impar), y mientras tanto, el segundo esclavo mismo de cada lazo de control que es número par, ocuparía 3 bits de entrada y sus 4 bits de salida estarían llenos. Teniendo disponible en cada lazo de control 1 bit de entrada (sólo en el esclavo par de cada lazo de control) y 1 bit de salida en el esclavo 1 de cada lazo de control.
Es decir que, en cada lazo de control, el esclavo par tendría libre-disponible el bit (0.7) de entradas y el esclavo impar tendría libre-disponible el bit (0.3) de salida, cumpliendo con el 30% de entradas y salidas libres por si en algún momento se requiere añadir más elementos al proceso.
El diagrama de control bajo la norma ISA esta pensado para controlar y proteger un motor de 25 HP jaula de ardilla que llena el tanque de agua, estableciendo que el motor arranca en conexión Estrella-Delta.





PROGRAMACIÓN EN TIA PORTAL
Para poder realizar la programación en tía portal, necesitamos llenar la tabla de variables correspondientes a cada variable del control de llenado de cada tanque, las cuales están asignadas en la tabla 2 mediante lazos de control. En la figura 4 se muestran todas la variables necesarias a implementar para el control de 5 los tanques de agua.
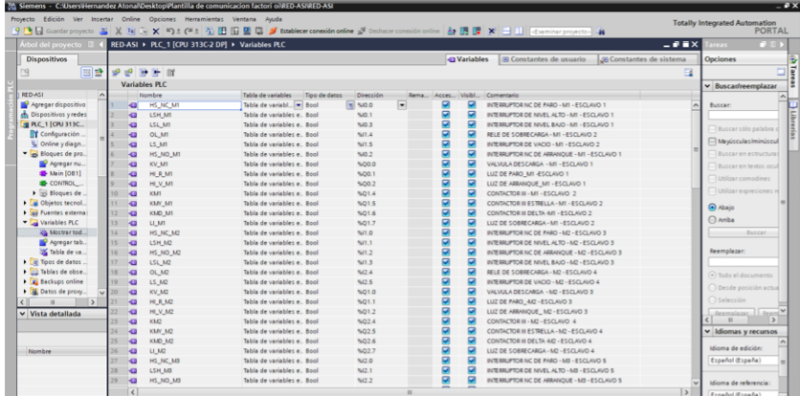
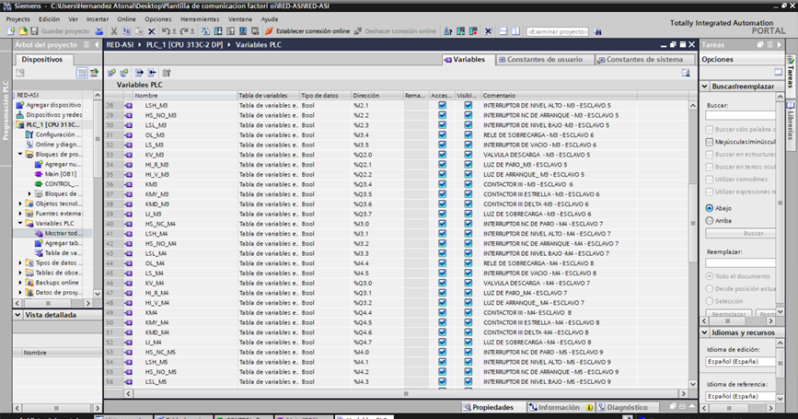
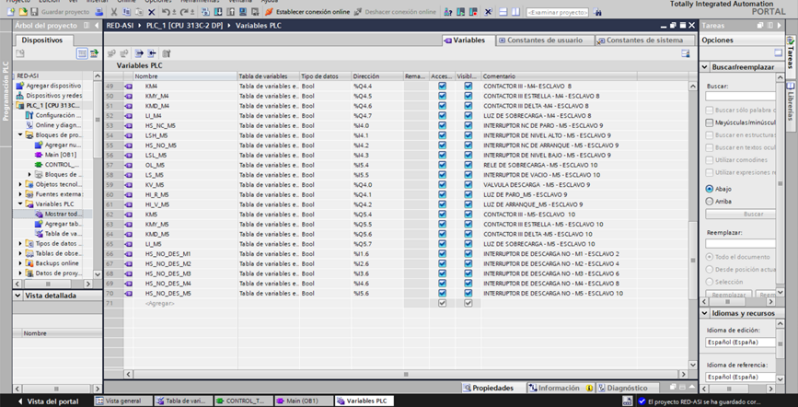
Como se puede observar, para todo el proceso de llenado de los 5 tanques se requieren 70 variables, 14 variables por cada proceso, es aquí donde se demuestra la practicidad de implementar una red de control AS-I, ya que esta nos permite reducir el número de cableado y conexiones que se requieren para el control de llenado de los 5 tanques de agua.
Y como sabemos estos procesos se van a controlar de manera independiente, pero trabajando todos de la misma manera, entonces para mayor practicidad realizamos la programación del control del proceso en un bloque FC, mediante el uso de la programación orientada a objetos en donde con base a las entradas sensores/actuadores se realiza un paso de parámetros para poder utilizar el mismo código de programación para controlar los 5 tanques de agua.
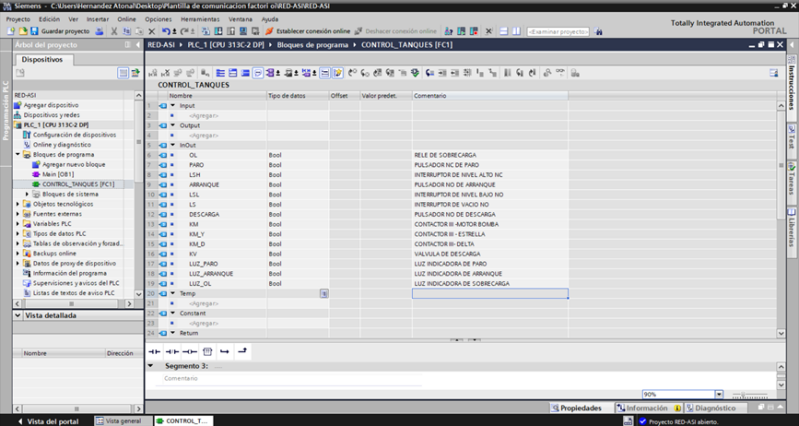
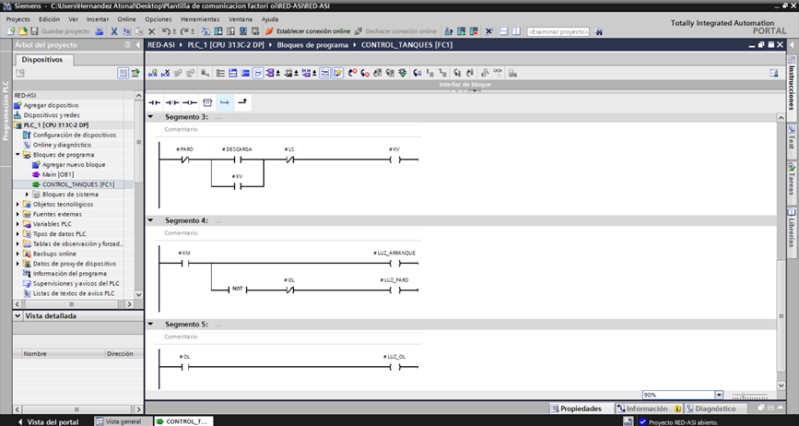
Entonces como se muestra en la siguiente figura 5 se añadió un bloque FC llamado CONTROL_TANQUES, al cual se le han declarado las viables que se usaran para el paso de parámetros de tipo InOut.
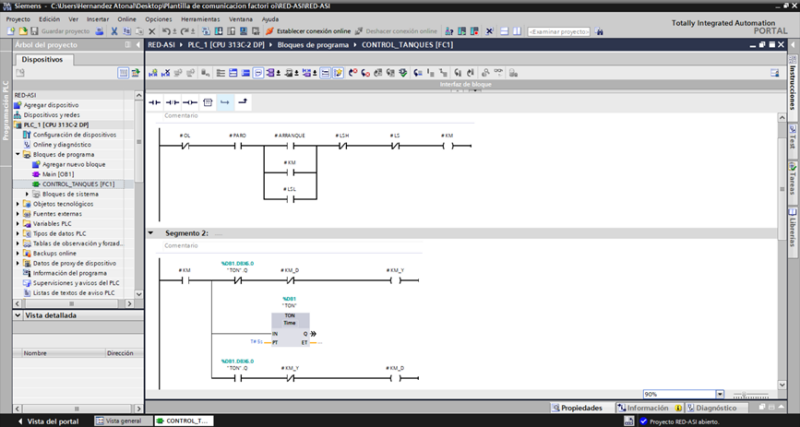
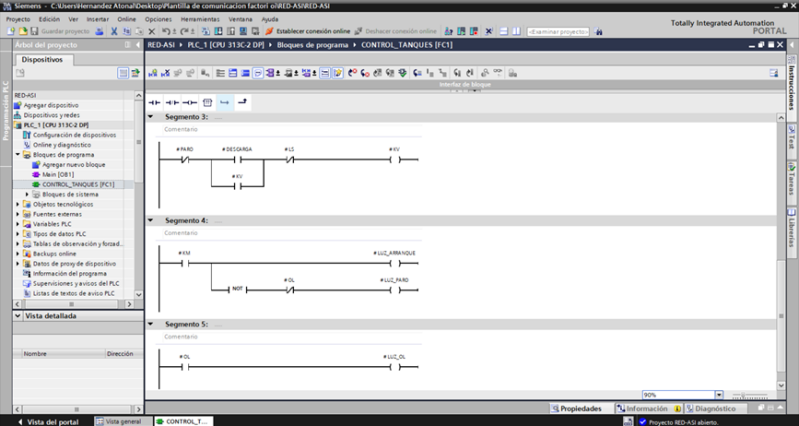
Como se puede observar en las siguientes figuras 6, 6.1 , estamos nuevamente aplicando exactamente la programación que se realizó en el proyecto 1 para el control del llenado de un tanque de agua, con arranque del motor en Estrella-Delta.
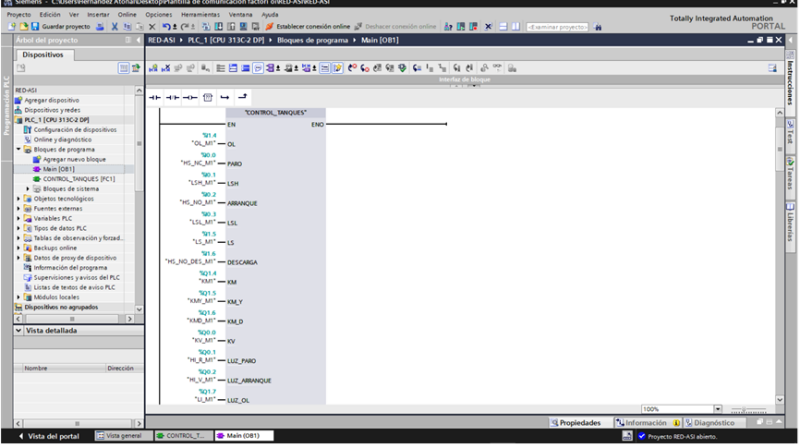
Ahora, en el bloque principal MAIN, hacemos el llamado del bloque FC “CONTROL_TANQUES” para poder realizar el paso de las variables con las que va a trabajar la programación, como son 5 tanques de agua, entonces se debe hacer el llamado del bloque 5 veces y se le tienen que enviar las respectivas variables que forman parte del llenado de cada tanque, las cuales ya tienen sus direcciones asignadas en los esclavos de la red.
Primer llamado para el control del tanque número 1.
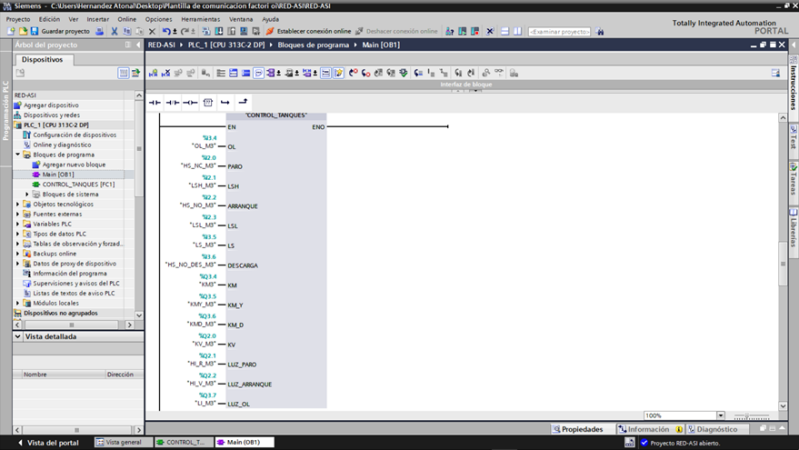
Llamado y asignación de variables del segundo tanque de agua.

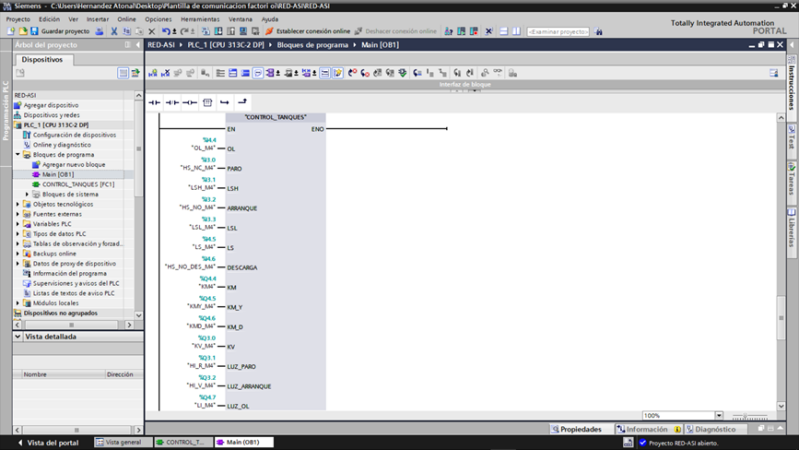
Llamado y asignación de variables del tercer tanque de agua.
Llamado y asignación de variables del cuarto tanque de agua.
Llamado y asignación de variables del quinto tanque de agua.

En conclusión, la implementación de una red AS-I que opera bajo la norma RS-485 a nivel de campo es muy eficiente para el control y automatización de procesos en los que se requieren de múltiples comunicaciones digitales y analógicas en tiempo real mediante un cable amarillo perfilado que ofrece buena potencia de comunicación, como en este caso se planteo para el control del llenado de 5 tanques de agua, utilizando esclavos inteligentes capaces de poder comunicarse por la red hasta el maestro mediante direcciones establecidas y hacer que el cableado, las conexiones y la comunicación se reduzcan optimizando, espacio, lógica y costos de operación en el proceso. Además de que es muy flexible para el diseño de la topología e implementación misma de la red.
Añadir comentario
Comentarios