

Seguidor de linea
Un carro seguidor de línea es un robot autónomo capaz de detectar una línea blanca o negra y andar sobre ella sin perder el camino. Esta clase de robot ha sido utilizada en la industrial dentro de almacenes y transporte dando buenos resultados y sufriendo diferentes modificaciones según el caso, como lo es el uso de sensores inductivos para detectar barras metálicas en el suelo.
Materiales:
- 1 chasis de carro con tres ruedas
- 1 Cable con switch
- 1 Arduino UNO Compatible con Cable USB
- 1 Cable micro USB
- 2 Baterías de respaldo de 5V 2600mAh
- 1 Puente H
- 2 Protoboard 170 Puntos
- Tornillos varios
- 3 Tuercas M3
- 5 Módulos sensor óptico reflectivo TCRT5000
- 8 Cables jumper macho a macho de 10cm
- 9 Cables jumper macho a macho 20cm
- 7 Cables jumper macho a macho de 10cm
- 16 Cables jumper Macho Hembra de 20 cm
- 2 Sujetadores de acrílico transparente de 3 mm
- separadores de metal de 8mm a los sensores
- 1 Cautín
Desarrollo:
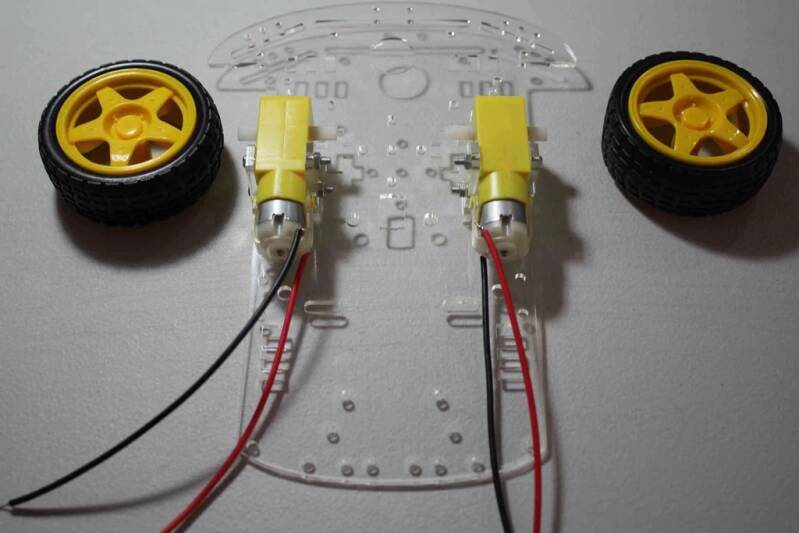
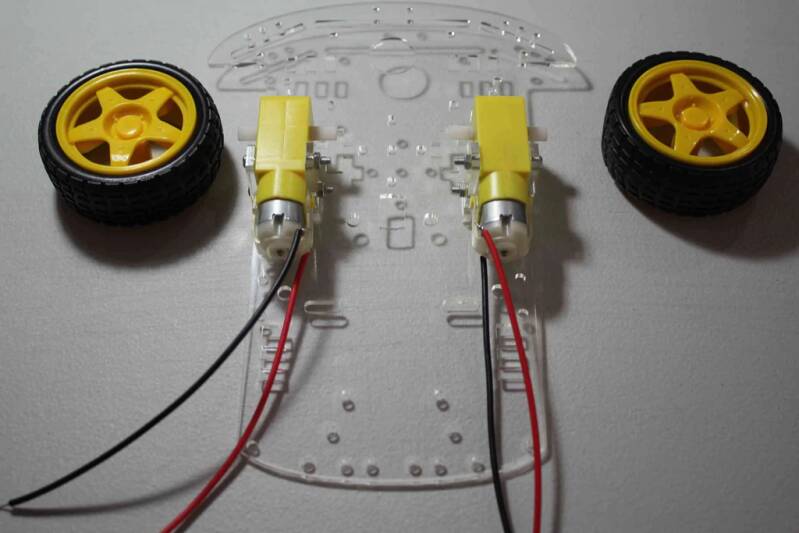
- Soldar los cables a los polos de los motores. Es importante soldar de la misma manera que se muestra en la imagen, de lo contrario los motores podrían girar hacia el sentido opuesto.
- Coloca motores y tornillos en los soportes.
- Coloca las ruedas y los encoders en los motores.
- Monta el Arduino UNO al chasis.
- Coloca el protoboard
- Conecta el puente H tal como se muestra en el diagrama
- Coloca los separadores de metal de 8mm a los sensores
- Atornilla los sensores a la pieza de acrílico.
- Conecta los Cables jumper macho hembra de 20cm
- Coloca el segundo protoboard para hacer las conexiones de los sensores.
- Pega las baterías al chasis de tres ruedas
- finalmente carga el codigo a ru arduino y comienza a hacer pruebas
Añadir comentario
Comentarios